04/07/2021
0
견해


베르누이 방정식이라고도 불리는 베르누이의 원리는 유체 역학 및 유체 역학에서 가장 중요한 개념 중 하나입니다. 스위스의 물리학자이자 수학자인 다니엘 베르누이가 1738년 그의 작업의 일부로 공식화했습니다.유체 역학” 그리고 움직이는 이상적인 유체의 에너지 보존의 일부입니다.
다음과 같은 상황을 상상해 봅시다. 우리는 물이 흐르는 호스를 가지고 있는데, 이 호스는 일정한 속도와 압력을 가지고 있습니다. 그런 다음 손가락으로 호스의 출구 구멍을 부분적으로 덮습니다. 이렇게 함으로써 이제 물이 더 빠른 속도로 나오는 것을 볼 수 있습니다. 이것은 베르누이의 원리가 작동하는 예입니다.
베르누이의 원리는 운동하는 이상 유체에 적용되므로 이 원리를 설명하기 전에 이상 유체의 의미를 언급하는 것이 중요합니다. 이상적인 유체는 실제 유체를 단순화한 것입니다. 이상은 수학적으로 더 간단하고 나중에 유동적인 경우로 확장할 수 있는 유용한 결과를 제공합니다. 진짜.
유체를 이상적인 것으로 간주하기 위해 만들어진 네 가지 가정이 있으며 모두 흐름과 관련이 있습니다.
• 정상 흐름: 정상 흐름은 유체가 이동하는 속도가 공간의 모든 지점에서 동일한 흐름입니다. 즉, 유체가 난류를 겪지 않는다고 가정합니다.
• 비압축성: 또한 이상적인 유체는 비압축성, 즉 항상 일정한 밀도를 갖는다고 가정합니다.
• 비점성: 점도는 일반적으로 유체가 움직임에 반대하는 저항을 나타내는 유체의 특성입니다. 점도는 기계적 마찰과 유사하다고 생각할 수 있습니다.
• 비회전 흐름: 이 가정에서는 움직이는 유체가 경로의 모든 지점 주위에서 어떤 유형의 원형 이동도 수행하지 않는다는 사실을 나타냅니다.
이러한 가정을 하고 이상적인 유체를 가짐으로써 우리는 수학적 처리를 크게 단순화하고 우리는 또한 에너지 절약을 보장합니다. 베르누이.
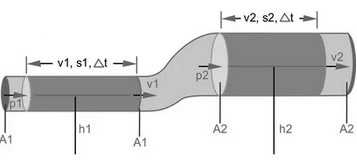
다음 그림과 같이 파이프를 통해 이동하는 이상적인 유체를 생각해 봅시다.
우리는 이제 에너지 보존 법칙을 표현하는 또 다른 방법인 일과 운동 에너지 정리를 사용할 것입니다. 이것은 우리에게 다음을 알려줍니다.
\(W = {\rm{\Delta }}K\)
여기서 \(W\)는 총 기계 작업이고 \({\rm{\Delta }}K\)는 두 점 사이의 운동 에너지 변화입니다. 이 시스템에는 두 가지 유형의 기계적 작업이 있습니다. 하나는 유체의 중력에 의해 수행되고 다른 하나는 유체의 압력으로 인해 발생합니다. \({W_g}\)가 중력에 의해 수행되는 기계적 작업이고 \({W_p}\)가 압력에 의해 수행되는 기계적 작업이라고 하면 다음과 같이 말할 수 있습니다.
\({W_g} + {W_p} = {\rm{\델타 }}K\)
중력은 보존력이므로 중력에 의해 수행되는 기계적 일은 두 점 사이의 중력 위치 에너지의 차이와 같습니다. 유체가 발견된 초기 높이는 \({y_1}\)이고 최종 높이는 \({y_2}\)이므로 다음과 같습니다.
\({W_g} = – {\rm{\Delta }}mg{\rm{\Delta }}y = – {\rm{\Delta }}mg\left( {{y_2} – {y_1}} \right )\)
여기서 \({\rm{\Delta }}m\)는 특정 지점을 통과하는 유체의 질량 부분이고 \(g\)는 중력 가속도입니다. 이상적인 유체는 비압축성이므로 \({\rm{\Delta }}m = \rho {\rm{\Delta }}V\)입니다. 여기서 \(\rho \)는 유체의 밀도이고 \({\rm{\Delta }}V\)는 점을 통해 흐르는 부피의 일부입니다. 이것을 위의 방정식에 대입하면 다음을 얻습니다.
\({W_g} = – \rho g{\rm{\Delta }}V\left( {{y_2} – {y_1}} \right)\)
이제 유체의 압력에 의해 수행되는 기계적인 일을 생각해 봅시다. 압력은 단위 면적당 가해지는 힘, 즉 \(F = PA\)입니다. 반면에 기계적 일은 \(W = F{\rm{\Delta }}x\)로 정의됩니다. 여기서 \(F\)는 적용된 힘이고 \({\rm{\Delta }}x\)입니다. 이 경우 x축에서 수행된 변위입니다. 이 맥락에서 우리는 \({\rm{\Delta }}x\)를 특정 지점을 통해 흐르는 유체 부분의 길이로 생각할 수 있습니다. 두 방정식을 결합하면 \(W = PA{\rm{\Delta }}x\)가 됩니다. 우리는 \(A{\rm{\Delta }}x = {\rm{\Delta }}V\), 즉 그 지점을 통해 흐르는 볼륨의 일부라는 것을 알 수 있습니다. 따라서 \(W = P{\rm{\Delta }}V\)가 됩니다.
초기 지점에서 기계적 작업은 시스템에서 \({P_1}{\rm{\Delta }}V\)와 동일하게 수행됩니다. 끝점에서 시스템은 주변 환경에서 \({P_2}{\rm{\Delta }}V\). 유체의 압력으로 인한 기계적 작업은 시스템에서 수행된 작업에서 시스템이 주변에 수행한 작업을 뺀 값이 됩니다. 즉, 다음과 같습니다.
\({W_p} = {P_1}{\rm{\Delta }}V – {P_2}{\rm{\Delta }}V = \left( {{P_1} – {P_2}} \right){\rm {\델타 }}V\)
마지막으로 운동 에너지의 차이 \({\rm{\Delta }}K\)는 끝점의 운동 에너지에서 시작점의 운동 에너지를 뺀 것과 같습니다. 그건:
\({\rm{\Delta }}K = \frac{1}{2}{\rm{\Delta }}mv_2^2 – \frac{1}{2}{\rm{\Delta }}mv_1^ 2 = \frac{1}{2}{\rm{\Delta }}m\left( {v_2^2 – v_1^2} \right)\)
위에서 우리는 \({\rm{\Delta }}m = \rho {\rm{\Delta }}V\)임을 압니다. 위의 방정식은 다음과 같습니다.
\({\rm{\Delta }}K = \frac{1}{2}\rho {\rm{\Delta }}V\left( {v_2^2 – v_1^2} \right)\)
에너지 보존 방정식에서 얻은 모든 결과를 대입하면 다음과 같이 얻습니다.
\(\left( {{P_1} – {P_2}} \right){\rm{\Delta }}V – \rho {\rm{\Delta }}V\left( {{y_2} – {y_1}} \right) = \frac{1}{2}\rho {\rm{\Delta }}V\left( {v_2^2 – v_1^2} \right)\)
방정식의 양쪽에 \({\rm{\Delta }}V\) 항을 인수분해하면 다음과 같이 됩니다.
\({P_1} – {P_2} – \rho g\left( {{y_2} – {y_1}} \right) = \frac{1}{2}\rho \left( {v_2^2 – v_1^2 } \오른쪽)\)
누락된 제품을 개발하려면 다음을 수행해야 합니다.
\({P_1} – {P_2} – \rho g{y_2} + \rho g{y_1} = \frac{1}{2}\rho v_2^2 – \frac{1}{2}\rho v_1^ 2\)
방정식의 양쪽에 있는 모든 항을 재정렬하면 다음과 같이 됩니다.
\({P_1} + \rho g{y_1} + \frac{1}{2}\rho v_1^2 = {P_2} + \rho g{y_2} + \frac{1}{2}\rho v_2^ 2\)
이 방정식은 우리 시스템의 초기 상태와 최종 상태 사이의 관계입니다. 마침내 다음과 같이 말할 수 있습니다.
\(P + \rho gy + \frac{1}{2}\rho {v^2} = 상수\)
이 마지막 방정식은 그 원리가 파생된 베르누이 방정식입니다. 베르누이의 원리는 움직이는 이상적인 유체에 대한 보존 법칙입니다.