0
Wyświetlenia


Moment siły to wielkość fizyczna, która wyraża efekt obrotu wokół osi, wywołany przez siłę działającą na przedmiot. Ta wielkość, znana również jako moment obrotowy/moment obrotowy, wraz z obliczeniem siły wypadkowej wynosi jeden podstawowych parametrów analizy statycznej w projektowaniu konstrukcji inżynierskich i architektura.

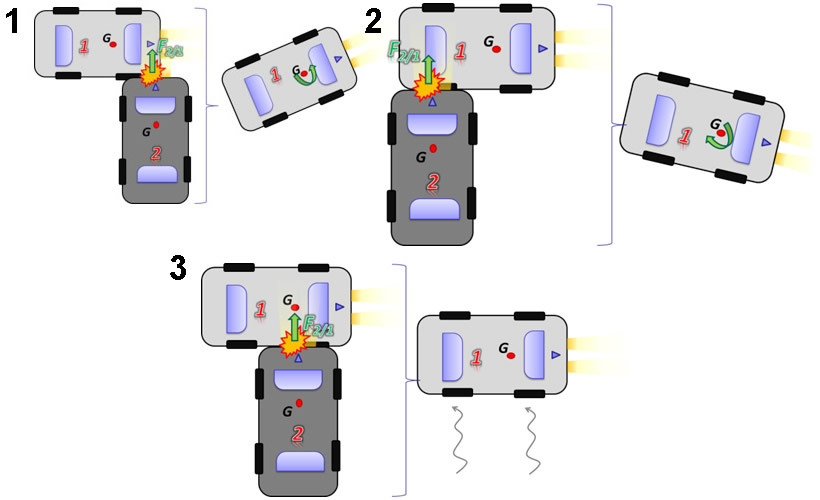
Aby lepiej zrozumieć efekt związany z momentem siły, przyjęto niefortunny przypadek zderzenia dwóch pojazdów na skrzyżowaniu. Intuicyjnie wiadomo, że wpływ siły uderzenia, jaką pojazd 1 wytworzy na 2 (\({\vec F_{2/1}}\)) zależy od wielkości i kierunku wspomnianej siły oraz punktu jej przyłożenia (pomijając efekt odkształcenia i tarcie). Na przykład, jeśli punkt uderzenia 2 na 1 znajduje się przed 1 (pierwszy diagram), obróci się w kierunku przeciwnym do ruchu wskazówek zegara (widok z góry). Jeśli uderzy w tył pojazdu, obróci go zgodnie z ruchem wskazówek zegara (drugi schemat), a jeśli linia Działanie siły uderzenia przechodzi przez środek ciężkości pojazdu 1, spowoduje to przesunięcie (trzeci wykres).
Biorąc pod uwagę poprzedni przykład, moment siły (M) można zdefiniować jako wielkość fizyczną który mierzy tendencję siły do powodowania obrotu bryły sztywnej wokół ustalonej osi.
 Teraz, ponieważ w definicji formalnej wspomniano o ciałach sztywnych, wygodnie jest określić, że jest to termin odnosi się do układu cząstek, w którym bliskość między nimi jest taka, że układ nie jest zdeformowany przez zastosowanie masa; to znaczy jest to ciało, którego odległość między dowolnymi dwoma punktami pozostaje stała przed przyłożeniem sił.
Teraz, ponieważ w definicji formalnej wspomniano o ciałach sztywnych, wygodnie jest określić, że jest to termin odnosi się do układu cząstek, w którym bliskość między nimi jest taka, że układ nie jest zdeformowany przez zastosowanie masa; to znaczy jest to ciało, którego odległość między dowolnymi dwoma punktami pozostaje stała przed przyłożeniem sił.
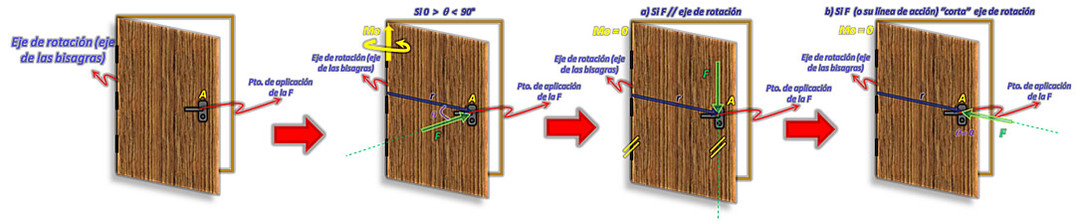
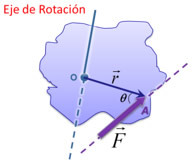 Jeśli weźmiemy pod uwagę siłę \(\vec F\), która działa w punkcie A na bryłę sztywną, która ma stałą oś obrotu przechodzącą przez „o”.
Jeśli weźmiemy pod uwagę siłę \(\vec F\), która działa w punkcie A na bryłę sztywną, która ma stałą oś obrotu przechodzącą przez „o”.
Moment siły względem punktu „o” definiuje się jako:
\(\overrightarrow {{M_o}} = \vec r \times \vec F\)
Gdzie:
\(\vec r\): Wektor położenia (biegnie od punktu odniesienia osi obrotu do punktu przyłożenia siły)
Jak widać, moment siły względem punktu jest wielkością wektorową, ponieważ pochodzi z iloczynu wektorowego, dlatego ma wielkość, kierunek i zwrot. Każda z tych funkcji została opisana poniżej:
wielkość Malbo:
\( I \overrightarrow {{M_o}} I = I \vec r \times \vec F I \), to z kolei można wyrazić jako:
Mo=r. F. sen
 Jak widać, na wielkość momentu siły względem punktu ma wpływ kąt utworzony między siłą (\(\vec F\)) a wektorem położenia (\(\vec r\)). No więc:
Jak widać, na wielkość momentu siły względem punktu ma wpływ kąt utworzony między siłą (\(\vec F\)) a wektorem położenia (\(\vec r\)). No więc:
If \(\vec r\;//\;\vec F \to \theta = 0^\circ \to {M_o} = r. F.{\rm{sin}}0^\circ \to {M_o} = 0\)
If \(\vec r\;\;\vec F \to \theta = 90^\circ \to {M_o} = r. F.{\rm{sin}}90^\circ \to {M_{oMAX}} = r. F\)
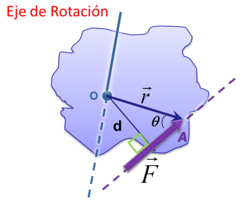
Jeżeli d: Prostopadła odległość między punktem odniesienia osi obrotu a siłą (lub linią jej działania), to:
re = r • grzechθ ∴ Mo = fa • re
W systemie międzynarodowym moment będzie miał jednostki (N.m), w języku angielskim (lb-f. ft), a więc ta wielkość będzie miała jednostki siły na długość.
Uwaga: Ponieważ pęd jest wielkością z definicji wektorową, jego jednostkami w układzie SI są po prostu niutonometry; W żadnym przypadku nie będzie wyrażona w dżulach (J), które są równoważne niutonomometrowi, ale są powiązane z wielkościami skalarnymi, takimi jak praca i energia.
Kierunek i sens Malbo:
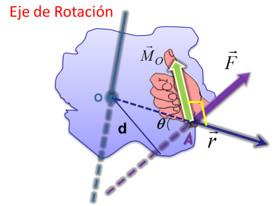 Ponieważ wektor \({\vec M_0}\) jest obliczany z iloczynu wektorowego, jego kierunek musi być prostopadła do płaszczyzny zawierającej \(\vec r\) i \(\vec F\), a jej zwrot podlega zasadzie ręki Prawidłowy.
Ponieważ wektor \({\vec M_0}\) jest obliczany z iloczynu wektorowego, jego kierunek musi być prostopadła do płaszczyzny zawierającej \(\vec r\) i \(\vec F\), a jej zwrot podlega zasadzie ręki Prawidłowy.
Wynika z tego, że moment siły względem punktu jest wielkością wektorową. Biorąc pod uwagę oś obrotu, wynika z tego, że siła nie wytwarza momentu w następujących przypadkach:
DO. Jeśli siła jest równoległa do osi obrotu.
B. Jeżeli siła (lub linia jej działania) przecina oś obrotu.
Moment siły względem osi jest zasadniczo rzutem momentu siły względem osi. Jest to więc wielkość skalarna, której znak wskazuje kierunek obrotu bryły sztywnej wokół osi i jest określona wzorem:
Gdzie:
\({\vec M_{pto}}:\) jest momentem siły względem punktu należącego do osi.
\(\widehat {axis}:\) to wektor jednostkowy osi.
