04/07/2021


ベルヌーイの定理は、ベルヌーイの方程式とも呼ばれ、流体力学および流体力学で最も重要な概念の 1 つです。 それはスイスの物理学者で数学者のダニエル・ベルヌーイによって 1738 年に彼の著作の一部として定式化されました。流体力学これは、運動中の理想的な流体におけるエネルギー保存の一部です。
次の状況を想像してみましょう。水が流れるホースがあり、そのホースから一定の速度と一定の圧力が生じます。 次に、ホースの出口穴を指で部分的に覆います。 こうすることで、水がより速く出てくることがわかります。 これはベルヌーイの定理が動作している例です。
ベルヌーイの原理は運動中の理想流体に適用されるため、この原理の説明に進む前に、理想流体とは何を意味するのかについて言及することが重要です。 理想流体は実際の流体を簡略化したものです。これは流体の記述のために行われます。 理想は数学的に単純で、後で流動的な場合に拡張できる有用な結果が得られます。 本物。
流体が理想的であると考えるためには 4 つの仮定があり、それらはすべて流れに関係しています。
• 定常流: 定常流とは、流体の移動速度が空間内のどの点でも同じである流れです。 言い換えれば、流体は乱流を受けないと仮定します。
• 非圧縮性: 理想的な流体は非圧縮性、つまり常に一定の密度をもつと仮定されます。
• 非粘度: 粘度は流体の特性であり、一般的に、流体が動きに抵抗する抵抗を表します。 粘度は機械的摩擦に似ていると考えることができます。
• 非回転流: この仮定では、移動する流体がその経路のどの点の周囲でもいかなる種類の円運動も行わないという事実を指します。
これらの仮定を立てて理想的な流体を得ることで、数学的処理が大幅に簡素化され、 また、エネルギーの保存も確保します。これは、次の原則への出発点です。 ベルヌーイ。
次の図に示すように、パイプ内を移動する理想的な流体を考えてみましょう。
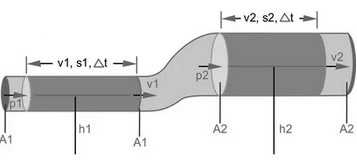
ここで、エネルギー保存の法則を表現する別の方法である仕事と運動エネルギーの定理を使用します。これにより、次のことがわかります。
\(W = {\rm{\デルタ }}K\)
ここで、 \(W\) は総機械的仕事、 \({\rm{\Delta }}K\) は 2 点間の運動エネルギーの変化です。 このシステムには 2 種類の機械的仕事があり、1 つは流体にかかる重力によって行われ、もう 1 つは流体の圧力によって行われます。 \({W_g}\) を重力によって行われる機械的仕事、\({W_p}\) を圧力によって行われる機械的仕事とすると、次のように言えます。
\({W_g} + {W_p} = {\rm{\Delta }}K\)
重力は保存力であるため、重力によって行われる機械的仕事は、2 点間の重力位置エネルギーの差に等しくなります。 流体が見つかった最初の高さは \({y_1}\) で、最終的な高さは \({y_2}\) であるため、次のようになります。
\({W_g} = – {\rm{\Delta }}mg{\rm{\Delta }}y = – {\rm{\Delta }}mg\left( {{y_2} – {y_1}} \right )\)
ここで、 \({\rm{\Delta }}m\) は特定の点を通過する流体の質量の部分、 \(g\) は重力による加速度です。 理想流体は非圧縮性なので、 \({\rm{\Delta }}m = \rho {\rm{\Delta }}V\) となります。 ここで、 \(\rho \) は流体の密度、 \({\rm{\Delta }}V\) は点を流れる体積の部分です。 これを上記の方程式に代入すると、次のようになります。
\({W_g} = – \rho g{\rm{\Delta }}V\left( {{y_2} – {y_1}} \right)\)
ここで、流体の圧力によって行われる機械的仕事を考えてみましょう。 圧力は単位面積あたりにかかる力、つまり \(F = PA\) です。 一方、機械的仕事は \(W = F{\rm{\Delta }}x\) として定義されます。ここで \(F\) は加えられる力、 \({\rm{\Delta }}x\) です。は、この場合に x 軸上で実行される変位です。 この文脈では、\({\rm{\Delta }}x\) は、特定の点を流れる流体の部分の長さと考えることができます。 両方の方程式を組み合わせると、\(W = PA{\rm{\Delta }}x\) となります。 \(A{\rm{\Delta }}x = {\rm{\Delta }}V\)、つまり、その点を流れる体積の部分であることがわかります。 したがって、 \(W = P{\rm{\Delta }}V\) が得られます。
初期時点では、システム上で \({P_1}{\rm{\Delta }}V\) に等しい機械的作業が行われます。 そして終点で、システムは周囲に対して \({P_2}{\rm{\Delta) に等しい機械的仕事を行います。 }}V\)。 流体の圧力による機械的仕事は、システムで行われる仕事から周囲での仕事を差し引いたものになります。つまり、次のようになります。
\({W_p} = {P_1}{\rm{\Delta }}V – {P_2}{\rm{\Delta }}V = \left( {{P_1} – {P_2}} \right){\rm {\デルタ }}V\)
最後に、運動エネルギーの差 \({\rm{\Delta }}K\) は、終点の運動エネルギーから開始点の運動エネルギーを引いたものと等しくなります。 あれは:
\({\rm{\Delta }}K = \frac{1}{2}{\rm{\Delta }}mv_2^2 – \frac{1}{2}{\rm{\Delta }}mv_1^ 2 = \frac{1}{2}{\rm{\Delta }}m\left( {v_2^2 – v_1^2} \right)\)
上記のことから、\({\rm{\Delta }}m = \rho {\rm{\Delta }}V\) であることがわかります。 上の式は次のようになります。
\({\rm{\Delta }}K = \frac{1}{2}\rho {\rm{\Delta }}V\left( {v_2^2 – v_1^2} \right)\)
得られたすべての結果をエネルギー保存方程式に代入すると、次のことが得られます。
\(\left( {{P_1} – {P_2}} \right){\rm{\Delta }}V – \rho {\rm{\Delta }}V\left( {{y_2} – {y_1}} \right) = \frac{1}{2}\rho {\rm{\Delta }}V\left( {v_2^2 – v_1^2} \right)\)
方程式の両辺で項 \({\rm{\Delta }}V\) を因数分解すると、次のようになります。
\({P_1} – {P_2} – \rho g\left( {{y_2} – {y_1}} \right) = \frac{1}{2}\rho \left( {v_2^2 – v_1^2 } \右)\)
不足している製品を開発するには、次のことを行う必要があります。
\({P_1} – {P_2} – \rho g{y_2} + \rho g{y_1} = \frac{1}{2}\rho v_2^2 – \frac{1}{2}\rho v_1^ 2\)
方程式の両側のすべての項を並べ替えると、次のことが得られます。
\({P_1} + \rho g{y_1} + \frac{1}{2}\rho v_1^2 = {P_2} + \rho g{y_2} + \frac{1}{2}\rho v_2^ 2\)
この方程式は、システムの初期状態と最終状態の間の関係です。 最終的に次のように言えます。
\(P + \rho gy + \frac{1}{2}\rho {v^2} = 定数\)
この最後の方程式は、その原理が導出されるベルヌーイ方程式です。 ベルヌーイの定理は、運動する理想的な流体の保存則です。