04/07/2021


Jėgos momentas yra fizinis dydis, išreiškiantis sukimosi aplink ašį poveikį, kurį sukuria jėga, veikianti objektą. Šis dydis, taip pat žinomas kaip sukimo momentas / sukimo momentas, ir kartu su gaunamos jėgos apskaičiavimu, yra vienas pagrindinių statinės analizės parametrų projektuojant konstrukcijas inžinerijos ir architektūra.

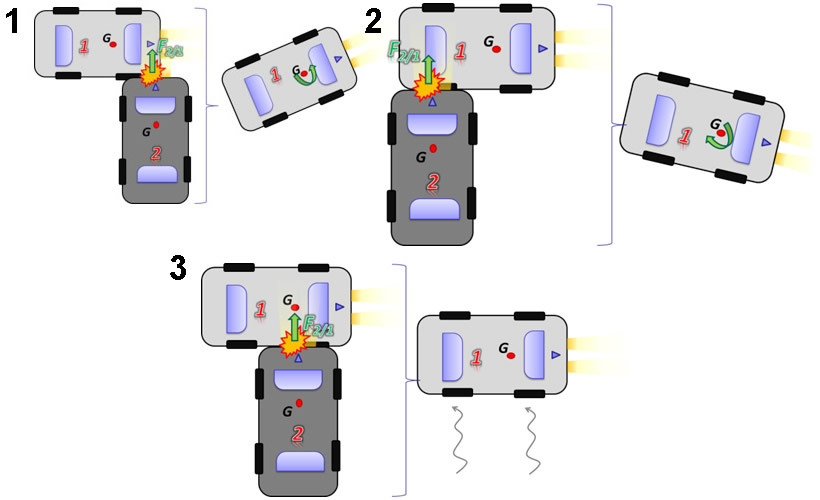
Norint geriau suprasti su jėgos momentu susijusį poveikį, bus daroma prielaida, kad sankryžoje susiduria dvi transporto priemonės. Intuityviai žinoma, kad smūgio jėgos, kurią sukels 1 transporto priemonė, poveikis 2 (\({\vec F_{2/1}}\)) priklauso nuo minėtos jėgos dydžio ir krypties bei jos taikymo taško (nekreipiant dėmesio į deformacijos poveikį ir trintis). Pavyzdžiui, jei 2 smūgio taškas 1 yra priešais 1 (pirmoji diagrama), jis suksis prieš laikrodžio rodyklę (žiūrint iš viršaus). Jei jis atsitrenks į automobilio galą, jis suksis pagal laikrodžio rodyklę (antra diagrama), o jei Smūgio jėgos veiksmas praeina per transporto priemonės 1 svorio centrą, tai sukels vertimą (trečioji diagrama).
Atsižvelgiant į ankstesnį pavyzdį, jėgos momentas (M) gali būti apibrėžtas kaip fizikinis dydis kuris matuoja jėgos polinkį sukelti standaus kūno sukimąsi apie fiksuotą ašį.
 Kadangi formaliame apibrėžime buvo paminėti standieji kūnai, patogu nurodyti, kad šis terminas yra reiškia dalelių sistemą, kurioje jų artumas yra toks, kad sistema nedeformuojasi naudojant kroviniai; tai yra kūnas, kurio atstumas tarp bet kurių dviejų taškų išlieka pastovus prieš veikiant jėgoms.
Kadangi formaliame apibrėžime buvo paminėti standieji kūnai, patogu nurodyti, kad šis terminas yra reiškia dalelių sistemą, kurioje jų artumas yra toks, kad sistema nedeformuojasi naudojant kroviniai; tai yra kūnas, kurio atstumas tarp bet kurių dviejų taškų išlieka pastovus prieš veikiant jėgoms.
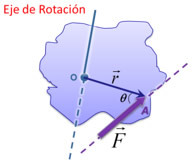 Jei atsižvelgsime į jėgą \(\vec F\), kuri veikia taške A standųjį kūną, turintį fiksuotą sukimosi ašį, kuri eina per "o".
Jei atsižvelgsime į jėgą \(\vec F\), kuri veikia taške A standųjį kūną, turintį fiksuotą sukimosi ašį, kuri eina per "o".
Jėgos momentas taško "o" atžvilgiu apibrėžiamas taip:
\(\overrightarrow {{M_o}} = \vec r \times \vec F\)
Kur:
\(\vec r\): padėties vektorius (eina nuo sukimosi ašies atskaitos taško iki jėgos taikymo taško)
Kaip matyti, jėgos momentas taško atžvilgiu yra vektorinis dydis, nes jis gaunamas iš vektorinės sandaugos, todėl jis turi dydį, kryptį ir prasmę. Kiekviena iš šių funkcijų aprašyta toliau:
dydis Marba:
\( I \overrightarrow {{M_o}} I = I \vec r \times \vec F I \), tai savo ruožtu galima išreikšti taip:
Mo=r. F. sen
 Kaip matyti, jėgos momento apie tašką dydį įtakoja kampas, susidaręs tarp jėgos (\(\vec F\)) ir padėties vektoriaus (\(\vec r\)). Gerai tada:
Kaip matyti, jėgos momento apie tašką dydį įtakoja kampas, susidaręs tarp jėgos (\(\vec F\)) ir padėties vektoriaus (\(\vec r\)). Gerai tada:
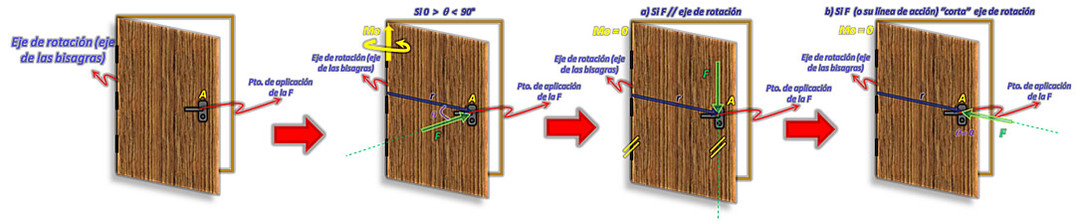
Jei \(\vec r\;//\;\vec F \to \theta = 0^\circ \to {M_o} = r. F.{\rm{sin}}0^\circ \to {M_o} = 0\)
Jei \(\vec r\;\;\vec F \to \theta = 90^\circ \to {M_o} = r. F.{\rm{sin}}90^\circ \to {M_{oMAX}} = r. F\)
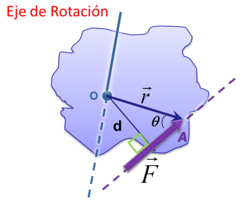
Jei d: statmenas atstumas tarp sukimosi ašies atskaitos taško ir jėgos (arba jos veikimo linijos), tada:
d = r • sinθ ∴ Mo = F • d
Tarptautinėje sistemoje momentas turės vienetus (N.m), anglų kalba (lb-f. pėdų), taigi šis dydis turės jėgos vienetus vienam ilgiui.
Pastaba: kadangi impulsas yra dydis, kuris pagal apibrėžimą yra vektorinis, jo vienetai SI sistemoje yra tiesiog Niutonas.metrai; Jokiu būdu jis nebus išreikštas džauliais (J), kuris yra lygus Newton.meter, bet yra susijęs su skaliariniu dydžiu, pavyzdžiui, darbu ir energija.
Kryptis ir jausmas Marba:
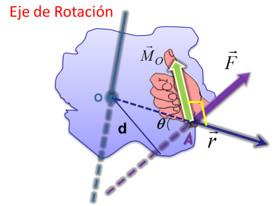 Kadangi vektorius \({\vec M_0}\) apskaičiuojamas iš vektorinės sandaugos, jo kryptis turi būti statmena plokštumai, kurioje yra \(\vec r\) ir \(\vec F\), o jos prasmė paklūsta rankos taisyklei teisingai.
Kadangi vektorius \({\vec M_0}\) apskaičiuojamas iš vektorinės sandaugos, jo kryptis turi būti statmena plokštumai, kurioje yra \(\vec r\) ir \(\vec F\), o jos prasmė paklūsta rankos taisyklei teisingai.
Iš to išplaukia, kad jėgos momentas apie tašką yra vektorinis dydis. Atsižvelgiant į sukimosi ašį, darytina išvada, kad jėga nesukuria momento šiais atvejais:
KAM. Jei jėga lygiagreti sukimosi ašiai.
b. Jeigu jėga (arba jos veikimo linija) kerta sukimosi ašį.
Jėgos momentas apie ašį iš esmės yra jėgos momento apie ašį projekcija. Todėl tai yra skaliarinis dydis, kurio ženklas rodo standaus kūno sukimosi aplink ašį kryptį ir nustatomas tokia išraiška:
Kur:
\({\vec M_{pto}}:\) yra jėgos momentas taško, kuris priklauso ašiai, atžvilgiu.
\(\widehat {axis}:\) yra ašies vieneto vektorius.